Ball and Beam Kit

Description
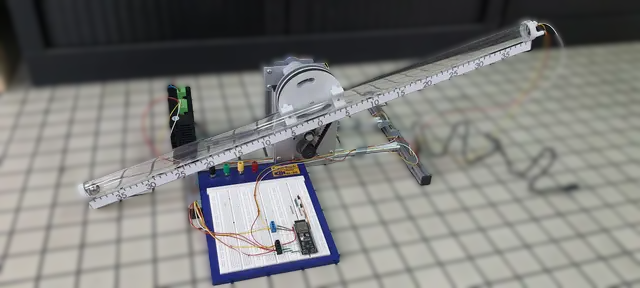
The Ball on Beam system is a classic control systems experiment where the objective is to balance a ball on a beam by controlling the beam's angle. This interactive setup is widely used for demonstrating feedback control, stability, and dynamic systems principles. The system includes a beam, a motor or servo mechanism for tilting, position sensors, and a control unit, making it ideal for hands-on learning in mechatronics and robotics.
Objective
The primary objective of the Ball on Beam system is to provide a hands-on learning experience in understanding and implementing control systems. It aims to help students grasp fundamental concepts of feedback control, error correction, and system stability while applying them in a practical setting. By integrating sensors for position detection and actuators for beam tilt adjustment, learners can explore the principles of dynamic system behavior and analyze phenomena such as oscillations and steady-state error. The system also focuses on developing programming skills by allowing users to implement and tune control algorithms like PID on microcontrollers such as ESP32 or Arduino. Additionally, it bridges the gap between theoretical concepts and real-world applications, fostering problem-solving skills in hardware-software integration and preparing participants for advanced projects in robotics, mechatronics, and automation technologies.
Method
The system operates by sensing the ball's position on the beam and adjusting the tilt angle to maintain balance. A microcontroller processes data from the position sensors and applies a control algorithm, such as PID (Proportional-Integral-Derivative) control. This algorithm calculates the error between the desired and actual positions of the ball and determines the necessary adjustments to the beam's angle. The motor or servo mechanism then executes these adjustments in real-time, ensuring the ball stays balanced or moves to the desired position.
Practical Applications
Control System Design: Testing and tuning PID controllers or other advanced control algorithms. Mechatronics and Robotics: Developing stabilization systems for robotics or drones. Dynamic Systems Analysis: Understanding concepts such as feedback, stability, and oscillations. Education and Training: Teaching engineering students about control theory, sensor integration, and system modeling. Prototype Testing: Using the principles for real-world balancing applications like self-balancing vehicles.
Key Features
Motorized beam with adjustable tilt mechanism. Position sensors for accurate ball tracking. Microcontroller-based control, compatible with platforms like ESP32 or Arduino. Support for multiple control algorithms (PID, fuzzy logic, etc.). Scaled beam with clear markings for precise measurements. Portable and modular design for ease of experimentation.
Learning Outcomes
Understand the principles of feedback and control systems. Gain hands-on experience with PID tuning and other control algorithms. Learn how to integrate sensors and actuators in mechatronic systems. Develop critical thinking for analyzing and solving dynamic system problems. Apply theoretical concepts in a practical, real-world scenario. Build foundational skills for advanced robotics and automation projects.
Functional In/Out Diagram
The functional diagram above illustrates the main components of the system and their interactions:
Input: Details will become.
Process: Details will become.
Output: Details will become.
Posted on 2024-12-10 11:37:10
We’re thrilled to introduce the "Ball on Beam System," a hands-on platform for exploring control system dynamics and balance control. This lab enables real-time testing of PID controllers, feedback mechanisms, and stability analysis. Perfect for education and research, it’s a must-have for control systems enthusiasts!