Inverted Pendulum
Description
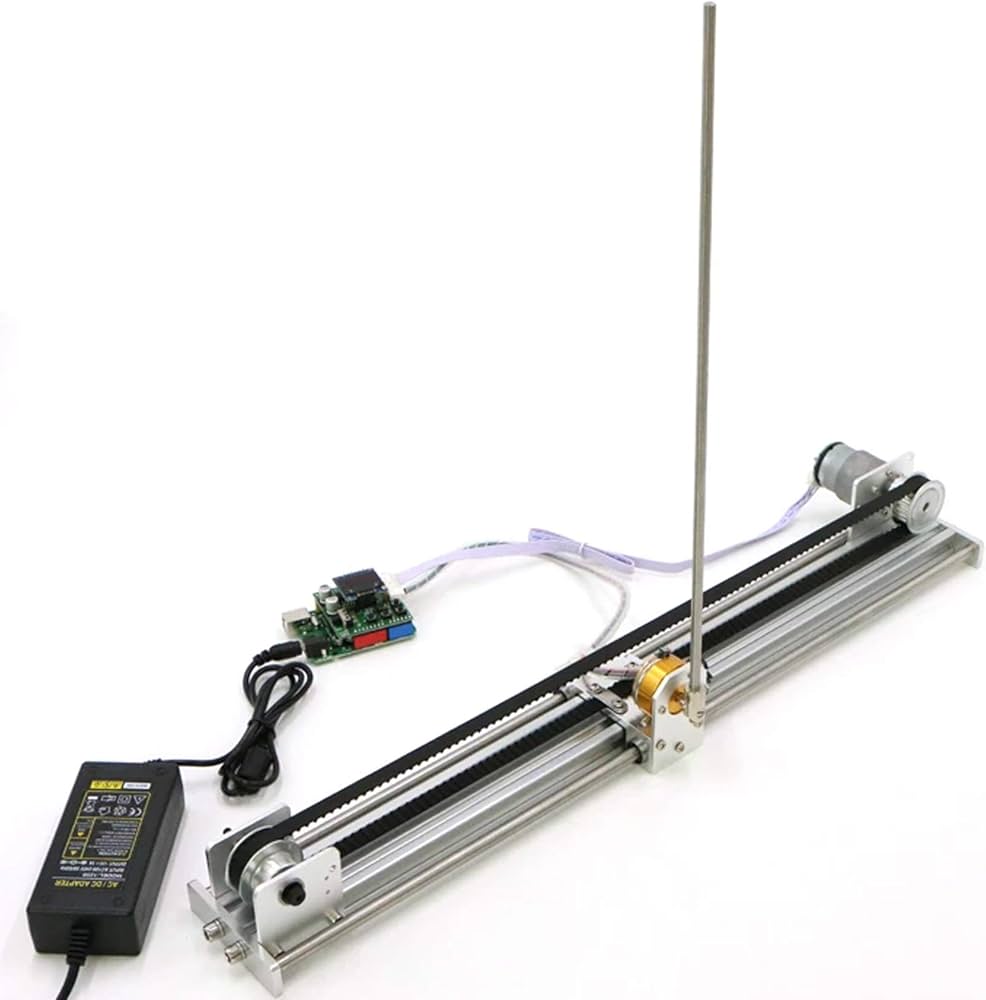
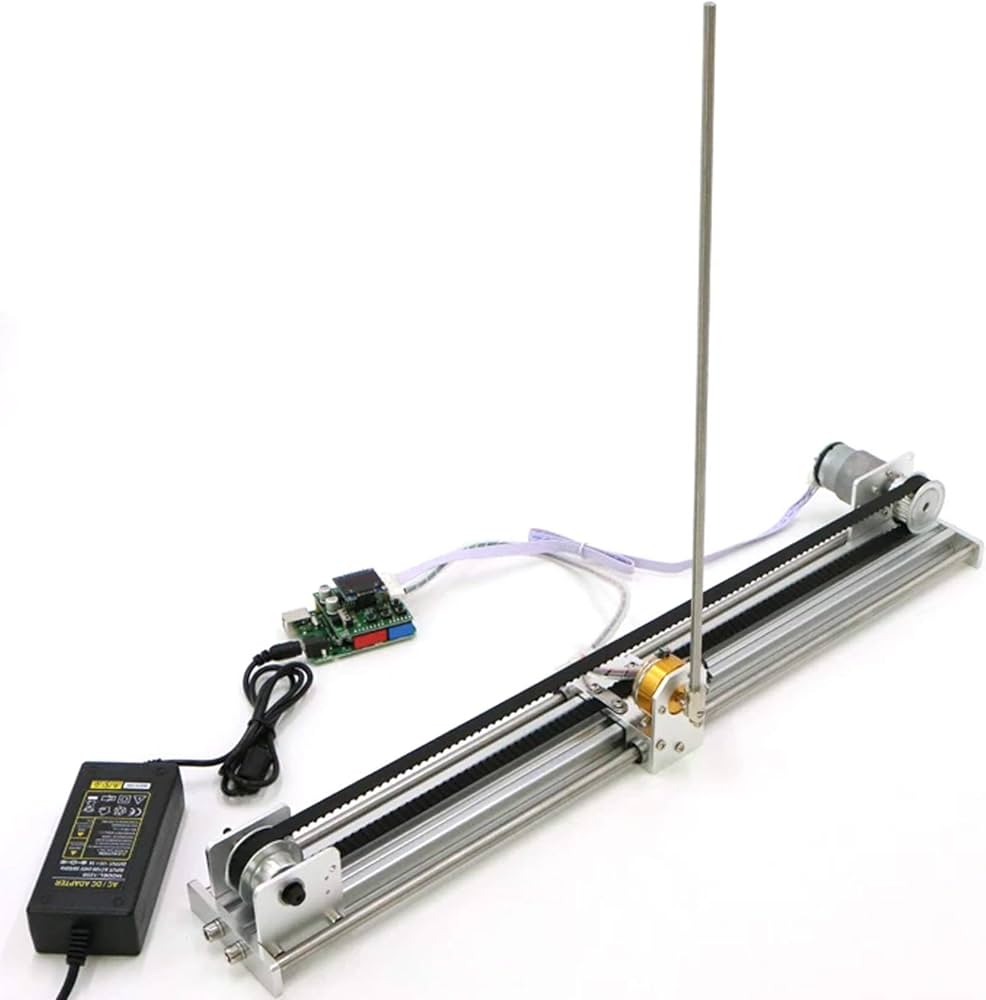
The Linear Inverted Pendulum kit enables remote control and real-time monitoring of a cart-pendulum system. Users apply PID control to regulate the cart’s linear position to stabilize the pendulum dynamically. The system is operated through a MATLAB App and communicates with an ESP32 microcontroller for data acquisition and actuator control.
Objective
To implement and tune a PID controller for stabilizing and controlling the linear position of a cart in an inverted pendulum setup, while analyzing system response characteristics such as error, stability, and control effort.
Method
Users set the desired cart position, adjust PID coefficients (Kp, Ki, Kd), and define experiment duration via the MATLAB App interface. The system applies the PID control algorithm to regulate the cart’s movement, collects time-series data on position and PID terms, and visualizes the results for analysis.
Practical Applications
Development of real-time control strategies Fundamentals of linear motion control systems Testing and validation of PID control techniques Hands-on understanding of system dynamics, stability, and tuning in mechanical systems
Key Features
Real-time PID control of a motorized cart Web-based command and data communication using ESP32 Adjustable PID parameters and target setpoints Visualization of position tracking and PID controller terms Downloadable experimental data for offline analysis
Learning Outcomes
Understand PID controller behavior in real-time systems Gain experience in tuning Kp, Ki, Kd values to achieve desired stability and performance Analyze position response, control effort, and system errors Develop practical skills in remote experimentation and embedded control system design
Functional In/Out Diagram
The functional diagram above illustrates the main components of the system and their interactions:
Input: User-set parameters: desired position, PID coefficients (Kp, Ki, Kd), experiment duration Real-time feedback: current cart position
Process: ESP32 reads the cart position, applies PID control logic, and commands the motor accordingly. Real-time calculation of error, integral, and derivative terms.
Output: Controlled cart movement towards the desired position Data logs of position, error, control signal (Vin), and PID terms Real-time plots showing system performance
Posted on 2025-04-28 10:18:08
P controller activity for the card position has been created.