Stepper–Servo–DC Motor Experimentation Lab
Description
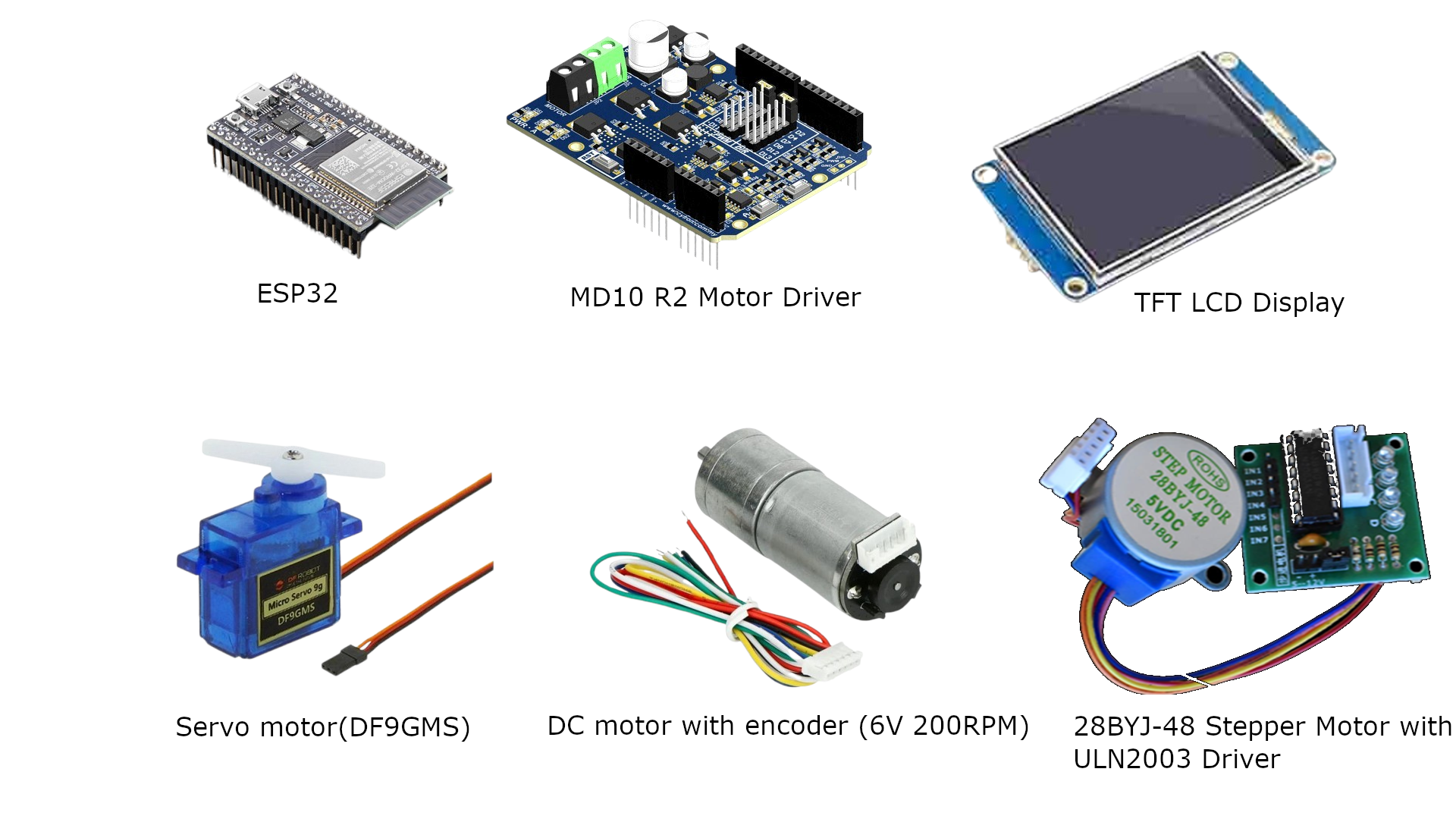
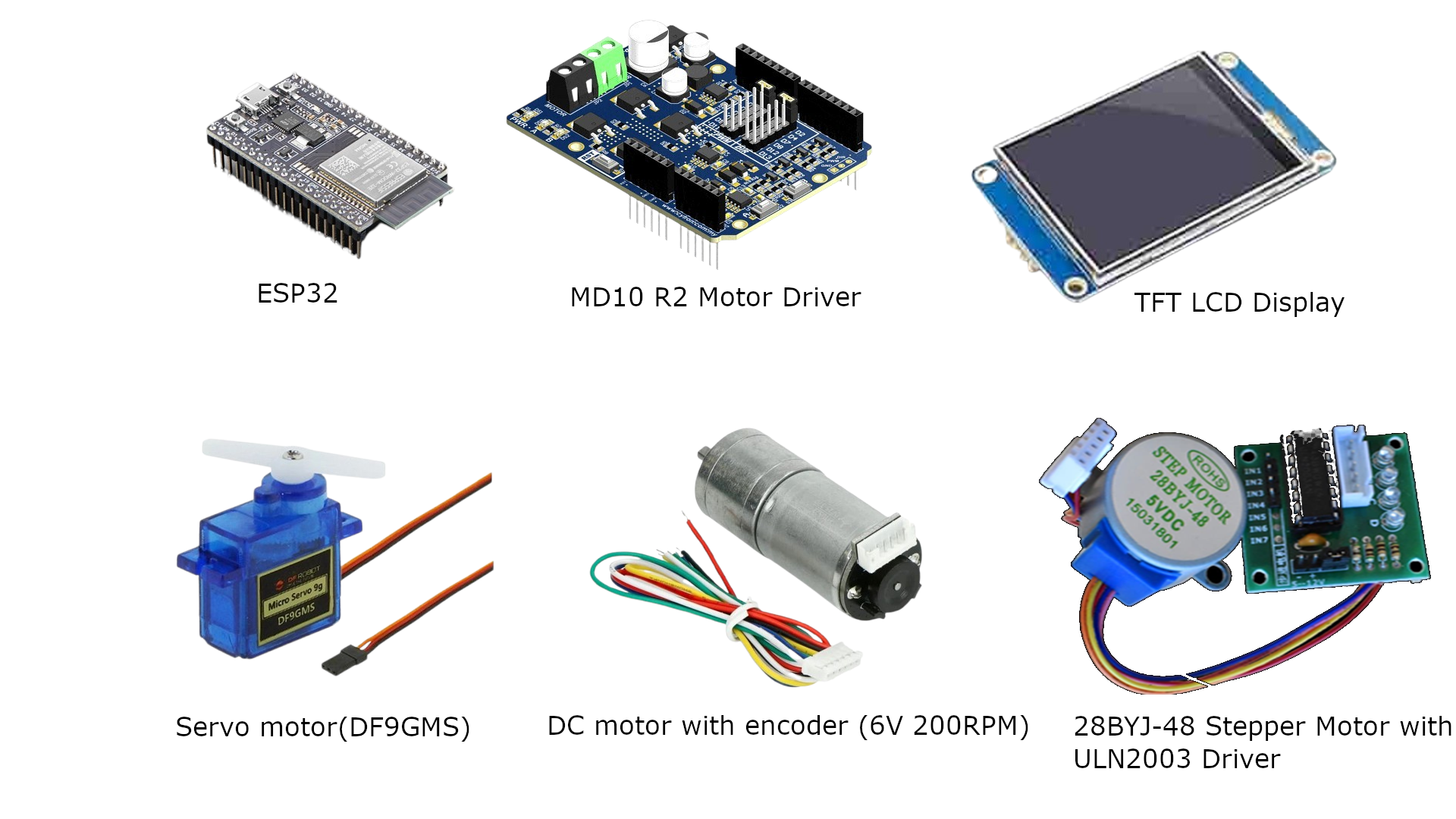
This laboratory setup features three different types of electric motors: a DC motor, a stepper motor, and a servo motor. It is designed to allow students and researchers to study, compare, and control each motor type remotely. Users can apply different control techniques such as PWM-based speed control for the DC motor, position control for the servo motor, and step-based angular positioning for the stepper motor. Real-time feedback is provided via sensors (e.g., encoders or potentiometers), enabling closed-loop control and performance analysis. The platform offers a hands-on experience in motor behavior characterization, controller tuning, and embedded system development. It is especially useful for courses and research projects in mechatronics, robotics, and control engineering.
Objective
To provide a remote platform for learning, testing, and comparing the behavior and control characteristics of three common types of electric motors: DC motor, stepper motor, and servo motor. The objective is to help students understand their individual strengths, limitations, and use cases.
Method
The setup consists of three independently controlled motors: - A DC motor, whose speed and direction are controlled via PWM. - A servo motor, controlled by position commands using pulse-width signals. - A stepper motor, driven by discrete step signals for precise angular positioning. Users interact with the system remotely by sending control inputs and observing motor responses in real time. Feedback (via encoders or internal sensors) is used to monitor performance. The platform allows experimentation with open-loop and closed-loop control, depending on the motor.
Practical Applications
- Robotics (actuation and movement control) - CNC machines and 3D printers (stepper motors) - Servo-based precision systems (e.g., camera gimbals) - Small electric vehicles and fans (DC motors) - Educational training in motor control and embedded systems
Key Features
- Three types of electric motors (DC, stepper, servo) in one platform - Individual control of speed, direction, and position - Real-time remote access - Visual feedback for understanding motor dynamics - Designed for hands-on experimentation and comparison - Embedded control using microcontrollers and PWM signals
Learning Outcomes
- Understand the operating principles of DC, stepper, and servo motors - Compare motor response in terms of speed, position, accuracy, and control strategy - Gain practical experience in embedded control and remote experimentation - Develop skills in mechatronics, feedback systems, and motion control
Functional In/Out Diagram
The functional diagram above illustrates the main components of the system and their interactions:
Input: - PWM signals for DC motor speed and direction control - Pulse-width signals for servo motor position control - Step and direction signals for stepper motor angular positioning - User-defined setpoints (speed or position)
Process: - The DC motor responds to PWM signals by adjusting its rotational speed and direction. - The servo motor moves to the target position based on pulse-width control. - The stepper motor rotates in discrete steps according to the step and direction signals
Output: - Real-time feedback of motor speed, position, and direction - Exportable data for analysis and reporting - Comparative insights into motor dynamics and control behavior